Introduction
In today's digital world, operating systems power almost everything, from smartphones and laptops to cars, robots, medical devices, and industrial machines. But not all operating systems work the same way.
When building embedded systems or time-critical applications, developers often come across two important terms:
- OS (Operating System)
- RTOS (Real-Time Operating System)
Although both manage hardware and software resources, their purpose, behavior, and performance are very different.
Understanding the difference between RTOS and OS is extremely important for students, embedded engineers, IoT developers, robotics engineers, and automotive professionals.
In this blog, we will deeply explore:
- What is an OS?
- What is an RTOS?
- RTOS vs OS differences
- Scheduling behavior
- Real-time constraints
- Use cases
- Advantages and disadvantages
- Practical examples
- Code snippets
- Which one should you learn?
Let's begin.
What is an Operating System (OS)?
An Operating System (OS) is software that acts as an interface between hardware and users.
It manages:
- CPU
- Memory
- Storage
- Input/output devices
- Applications
- File systems
The primary goal of a general-purpose OS is to provide:
- Convenience
- Multitasking
- User interaction
- High throughput
Popular operating systems include:
- Windows
- Linux
- macOS
- Android
- Ubuntu
These operating systems are designed for applications where timing is not extremely critical.
For example:
- Watching YouTube
- Browsing the internet
- Editing documents
- Gaming
- Running desktop applications
If an application takes a few milliseconds extra, users usually won't notice.
Example of a General OS
Imagine you are using a laptop.
At the same time:
- Spotify is playing music
- Chrome is open
- VS Code is compiling code
- Downloads are running
The operating system allocates CPU time among all applications.
Its goal is to maximize overall performance and user experience.
What is RTOS?
An RTOS (Real-Time Operating System) is a specialized operating system designed to process data and execute tasks within a strict time limit.
The key focus of RTOS is:
- Deterministic behavior
- Predictable response time
- Minimal latency
- Real-time execution
In RTOS, completing tasks on time is more important than overall throughput.
Even a small delay can cause serious failures in critical systems.
Real-Life Examples of RTOS
RTOS is commonly used in:
- Automotive ECUs
- Airbags
- Anti-lock braking systems (ABS)
- Industrial automation
- Medical equipment
- Robotics
- Drones
- Aerospace systems
- Telecom devices
- IoT devices
For example:
If an airbag deployment system reacts even 100 milliseconds late, it may fail to save lives.
That is why RTOS is essential.
Popular RTOS Examples
Some widely used RTOS platforms are:
- FreeRTOS
- VxWorks
- QNX
- Zephyr
- ThreadX
- RTLinux
- Micrium µC/OS
- Integrity RTOS
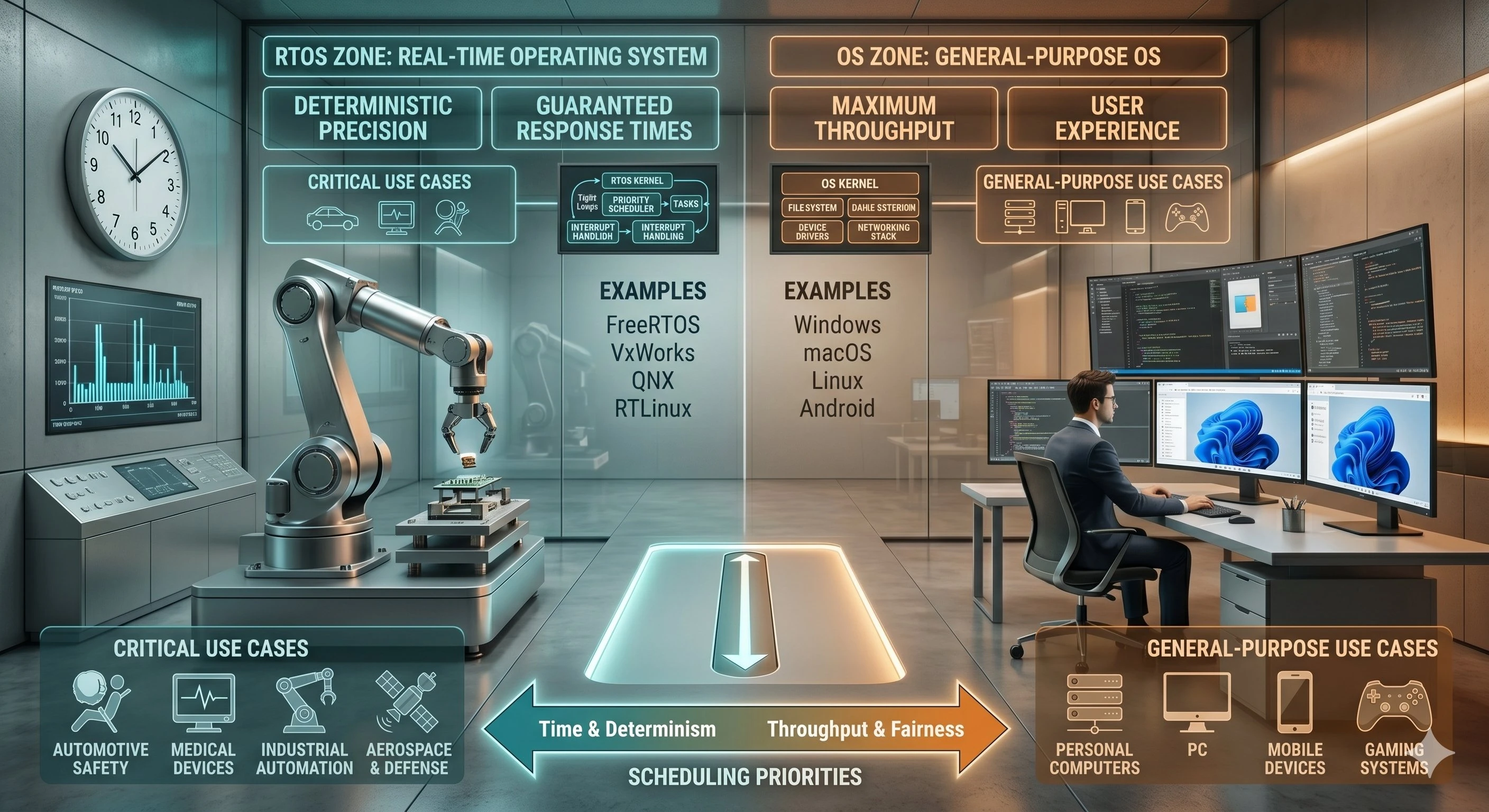
Core Difference Between RTOS and OS
The biggest difference is:
| Feature | OS | RTOS |
|---|---|---|
| Main Goal | User convenience | Predictable timing |
| Response Time | Variable | Deterministic |
| Task Scheduling | Fairness-based | Priority/time-based |
| Latency | Higher | Very low |
| Failure Impact | Usually acceptable | Can be critical |
| Use Cases | PCs, phones | Embedded systems |
Deterministic vs Non-Deterministic Systems
This is the heart of RTOS understanding.
OS = Non-Deterministic
A normal operating system cannot guarantee exactly when a task will execute.
Example:
You click an application.
Sometimes it opens instantly.
Sometimes it takes longer depending on:
- CPU load
- Background apps
- Memory usage
This unpredictability is acceptable in desktop systems.
RTOS = Deterministic
RTOS guarantees task execution within defined timing constraints.
Example:
A motor control task must run every 1 millisecond.
RTOS ensures it happens precisely.
This predictability is the core feature of RTOS.
Task Scheduling in OS vs RTOS
Scheduling determines which task gets CPU time.
Scheduling in General OS
General-purpose operating systems use scheduling algorithms focused on:
- Fairness
- Throughput
- User experience
Common schedulers include:
- Round Robin
- Completely Fair Scheduler (Linux)
- Multilevel Queue Scheduling
The OS tries to keep all applications responsive.
Scheduling in RTOS
RTOS uses priority-based scheduling.
Higher-priority tasks execute immediately.
Critical tasks always get CPU access first.
Most RTOS systems support:
- Preemptive scheduling
- Priority inheritance
- Time slicing
- Interrupt handling
RTOS Scheduling Example
Suppose there are three tasks:
| Task | Priority |
|---|---|
| Airbag system | Highest |
| Dashboard update | Medium |
| Music system | Lowest |
If a crash occurs:
- Airbag task immediately interrupts everything
- RTOS prioritizes life-critical operation
This is real-time behavior.
Memory Management Difference
OS Memory Management
General OS uses:
- Virtual memory
- Paging
- Swapping
- Dynamic allocation
This improves flexibility but increases unpredictability.
RTOS Memory Management
RTOS often avoids:
- Paging
- Swapping
Why?
Because these mechanisms introduce delays.
RTOS usually prefers:
- Static memory allocation
- Fixed memory blocks
- Predictable allocation timing
Interrupt Handling
Interrupts are extremely important in embedded systems.
In General OS
Interrupt response may vary.
The OS handles multiple layers:
- Drivers
- Kernel processes
- User-space tasks
Latency is acceptable.
In RTOS
Interrupt latency must be extremely low.
RTOS is optimized for:
- Fast ISR execution
- Minimal context switching delay
- Predictable interrupt response
Context Switching
Context switching means saving one task state and loading another.
OS Context Switching
In desktop systems:
- Context switching overhead is acceptable
Performance matters more than exact timing.
RTOS Context Switching
RTOS minimizes switching time.
Fast context switching ensures:
- Immediate task response
- Predictable behavior
Hard Real-Time vs Soft Real-Time
RTOS systems are classified into two types.
Hard Real-Time Systems
Missing a deadline is unacceptable.
Examples:
- Airbags
- Pacemakers
- Missile systems
- Aircraft control
Failure can cause:
- Damage
- Injury
- Death
Soft Real-Time Systems
Occasional delays are tolerable.
Examples:
- Video streaming
- Audio systems
- Online gaming
Performance degradation occurs, but system failure does not.
Architecture Difference
OS Architecture
General OS architecture is large and feature-rich.
Includes:
- GUI
- File systems
- Networking
- Drivers
- Multimedia services
This increases complexity.
RTOS Architecture
RTOS architecture is lightweight.
Focus areas:
- Scheduler
- Interrupt handling
- IPC
- Timing control
Minimal overhead improves predictability.
RTOS Example Using FreeRTOS
Below is a simple FreeRTOS example.
FreeRTOS Task Example
#include "FreeRTOS.h"
#include "task.h"
#include <stdio.h>
void Task1(void *pvParameters)
{
while(1)
{
printf("Task 1 Running\n");
vTaskDelay(1000 / portTICK_PERIOD_MS);
}
}
void Task2(void *pvParameters)
{
while(1)
{
printf("Task 2 Running\n");
vTaskDelay(500 / portTICK_PERIOD_MS);
}
}
int main(void)
{
xTaskCreate(Task1, "Task1", 1000, NULL, 1, NULL);
xTaskCreate(Task2, "Task2", 1000, NULL, 2, NULL);
vTaskStartScheduler();
while(1);
}
Explanation of the Code
In this example:
- Two tasks are created
- Task2 has higher priority
- RTOS scheduler manages execution
- Tasks run independently
This demonstrates multitasking in RTOS.
Linux OS Multithreading Example
Here is a simple Linux thread example.
#include <pthread.h>
#include <stdio.h>
#include <unistd.h>
void* task1(void* arg)
{
while(1)
{
printf("Task 1 Running\n");
sleep(1);
}
}
void* task2(void* arg)
{
while(1)
{
printf("Task 2 Running\n");
sleep(2);
}
}
int main()
{
pthread_t t1, t2;
pthread_create(&t1, NULL, task1, NULL);
pthread_create(&t2, NULL, task2, NULL);
pthread_join(t1, NULL);
pthread_join(t2, NULL);
return 0;
}
Difference in the Above Examples
In Linux:
- Timing is not guaranteed
- Threads depend on OS scheduler
- Delays may vary
In RTOS:
- Scheduling is deterministic
- Timing precision is predictable
Advantages of RTOS
1. Predictable Timing
Tasks execute within defined deadlines.
2. Fast Response
Low interrupt latency ensures immediate action.
3. Better Reliability
Ideal for mission-critical systems.
4. Efficient Resource Usage
RTOS is optimized for embedded hardware.
5. Multitasking Support
Handles multiple real-time tasks efficiently.
Disadvantages of RTOS
1. Higher Development Complexity
Designing real-time systems is difficult.
2. Limited Features
RTOS usually lacks advanced desktop features.
3. Debugging Challenges
Race conditions and timing bugs are harder to detect.
4. Cost
Some commercial RTOS platforms are expensive.
Advantages of General OS
1. User-Friendly
Rich interfaces and usability.
2. Feature-Rich
Supports multimedia, networking, applications, etc.
3. Easier Development
Application development is simpler.
4. Large Software Ecosystem
Massive tool and application support.
Disadvantages of General OS
1. Unpredictable Timing
Not suitable for strict real-time tasks.
2. Higher Latency
Interrupt handling is slower.
3. Resource Heavy
Requires more memory and CPU power.
RTOS vs OS in Embedded Systems
Most small embedded systems use RTOS because they require:
- Precise timing
- Sensor handling
- Hardware control
- Real-time response
Examples:
| Device | Preferred System |
|---|---|
| Washing machine | RTOS |
| Smart TV | Linux OS |
| Drone controller | RTOS |
| Laptop | General OS |
| Automotive ECU | RTOS |
| Smartphone | Android/Linux |
When Should You Use RTOS?
Use RTOS when your system needs:
- Guaranteed response time
- Deterministic scheduling
- Hardware-level timing control
- Critical task execution
- Low latency
When Should You Use a General OS?
Use a general-purpose OS when you need:
- GUI
- File management
- Multimedia support
- Large applications
- User interaction
RTOS in Automotive Industry
Modern vehicles contain dozens of ECUs.
Functions include:
- Engine management
- ADAS
- ABS braking
- Infotainment
- Airbags
Most critical systems use RTOS for guaranteed response timing.
This is why RTOS knowledge is highly valuable in automotive embedded engineering.
RTOS in IoT Devices
IoT devices often have:
- Limited memory
- Low-power processors
- Sensor communication
- Real-time data processing
RTOS helps optimize performance and power efficiency.
Popular IoT RTOS platforms include:
- FreeRTOS
- Zephyr
- RIOT OS
Future of RTOS
With growth in:
- Autonomous vehicles
- Robotics
- AI edge devices
- Smart factories
- IoT
- Aerospace
RTOS demand is increasing rapidly.
Embedded engineers with RTOS expertise are highly sought after.
Final Comparison Table
| Parameter | OS | RTOS |
|---|---|---|
| Full Form | Operating System | Real-Time Operating System |
| Goal | User convenience | Real-time response |
| Timing | Unpredictable | Predictable |
| Scheduling | Fairness | Priority-based |
| Latency | Higher | Minimal |
| Complexity | Feature-rich | Lightweight |
| Usage | Computers, phones | Embedded systems |
| Memory Usage | Higher | Lower |
| Interrupt Handling | Slower | Faster |
| Reliability | Moderate | Very high |
Conclusion
RTOS and general-purpose operating systems are built for completely different goals.
A normal OS focuses on:
- User experience
- Multitasking
- Rich functionality
Whereas RTOS focuses on:
- Deterministic timing
- Reliability
- Real-time performance
If you are entering embedded systems, automotive engineering, IoT, robotics, or industrial automation, learning RTOS is extremely important.
Understanding RTOS concepts such as:
- Scheduling
- Task management
- Interrupt handling
- Synchronization
- Timing analysis
can significantly improve your embedded programming skills and career opportunities.
As real-time systems continue to power modern technology, RTOS knowledge is becoming one of the most valuable skills in embedded engineering.